

Ijraset Journal For Research in Applied Science and Engineering Technology
Deep Learning Algorithm for Optimization of Wait Time at a Traffic Signal Controlled Intersection for Smart Traffic Management
Authors: Sahil Sura, Himmi Gupta
DOI Link: https://doi.org/10.22214/ijraset.2024.57950
Certificate: View Certificate
Abstract
The urban landscape is constantly shifting and adapting as a result of factors such as population increase, immigration, and changes in the economy, politics, and culture. Concerns like growing road obstruction, transit delays, pollution levels, consumption of gasoline, etc. have resulted from higher traffic volumes in metropolitan areas. Life expectancy, road safety, environmental quality, and commute times are all impacted by traffic congestion. At junctions, traffic lights play a crucial role in regulating vehicular flow. The traditional pre-timed traffic systems have been ineffective due to the dramatic growth in lights become insufficient in managing traffic clearance which leads to heavy traffic congestion at intersection. Another major issue is that the Emergency vehicles like ambulance, police van, fire brigade experience prolonged waiting time to cross the intersection. For these reasons, development of smart intersections with the aid of technologies such as fuzzy logic, neural networks, artificial intelligence, multiprocessor systems etc. can help to provide the solution and improve the urban traffic management problems. Smart cities are increasingly adopting solutions by using adaptive and intelligent approach to develop smart traffic lights to improve the traffic flow at intersections. The current study on smart traffic light system makes contribution in developing intelligent and adaptive systems to resolve traffic congestion problems at single and connected intersections with an objective to improve traffic clearance and prioritize passage of Emergency vehicle at an isolated intersection. Another problem is the one generally faced by pedestrians as they have to wait for a prolonged interval of time for getting way to cross the lane of major intersection specially at peak traffic hours. This problem has also been considered in the study. System performance has been tested for a twenty-four-hour traffic pattern at an isolated intersection. The outcomes of the simulations showed that the suggested design outperformed the standard fixed-time method in terms of automotive clearing, rescue vehicles passing, and pedestrians wait time.
Introduction
I. INTRODUCTION
Management of the traffic light control system is one of the critical and significant systems to concentrate on improving vehicle connectivity and smooth-flow without any obstacles for the ever-growing countries like India. This traffic control systems are more complex and requires more computing power to handle road traffic effectively without any congestion. This system should be monitored for the movement of vehicles to ensure the smooth flow of vehicles on the road. The movement of vehicles, road operation and maintenance requires constant attention to improve the performance of the traffic system. Smooth flow of vehicles is affected by the density of the traffic flow. Rapid increase in traffic density leads to road traffic congestion, and this being an ever increasing problem requires immediate attention to solve and develop an efficient model [1].
Congestion in major cities has spread over the world. More people than ever before need to be transported on metropolitan arterials. The variety of users (younger and older drivers, more distractions, bigger cars, etc.) and the need for these services continue to outstrip the available infrastructure. Congestion on the roads is a major issue in emerging south Asian nations like India due to the rapid increase in the population and the accompanying increase in the number of cars. The United Nations estimates that by 2050, the global population will have reached an astounding 11.8 billion, up from its current estimate of 7.6 billion. By the year 2030, India will have more people than China. The problems of fast urbanization and the expansion of the automobile industry are exacerbated in India, a developing nation with a population of almost 1.3 billion people. Delays, energy use, pollution, and the cost to operate a car all rise as a consequence of congestion.
Effective signal management systems [3,4] may make good use of road space in light of the growing traffic issue, the diverse character of moving vehicles, and the limited opportunities for infrastructure growth in urban road networks.
Many road networks are experiencing issues with the capacity decline of roads and the accompanying Level of Service as a result of the rising number of cars in metropolitan areas. Traffic control systems at crossings with fixed signal timings generate several traffic problems. They always go through the same phases for the same amount of time. The need for innovative traffic management technologies, such as those found in the area of Intelligent Transport Systems, rises in tandem with the rising demand for road capacity.
There are now three widely accepted techniques for managing traffic flow:
First, there's manual controlling, which uses, you guessed it, people to manage traffic flow. The police officers responsible for traffic management are assigned a specific territory. Police officers enforcing traffic laws use signboards, signal lights, and whistles.
Traditional traffic signals that use static timers are in category 2. The timer is programmed with a fixed numerical value. Based on the timing setting, the lights will cycle between red and green.
Thirdly, electronic sensors, such as loop detectors or proximity sensors, may be installed along the highway. Information regarding road traffic is provided by this sensor. The traffic lights are managed using information gathered from sensors.
These more traditional approaches do have their downsides. There is a high labor cost associated with the manual control mechanism. Due to insufficient manpower, traffic police cannot physically direct vehicular movement in every part of a city or town. This suggests the need for a more effective traffic management system. With static traffic control, each phase of the traffic signal has its own timing that does not change based on the actual volume of traffic at any given moment. Due to the high cost of collecting high-quality data utilizing complex and costly technologies, restricted budgets typically force researchers to choose between accuracy and coverage when using electronic sensors like proximity sensors or loop detectors. In addition, several sensors are often needed to provide enough coverage over a network of facilities since most sensors have a very small effective range.
The continuous surge in road traffic projects a severe problem of congestion that causes inconvenience to commuters. Traffic causes delays, which may have negative effects on efficiency, the ecosystem, and energy consumption. The main concerns resulting in traffic clogging in urban areas as can be listed as follows:
A. Traffic Signal At Intersection
Enormous growth in traffic and lack of appropriate road traffic management leads to traffic congestion and introduces vehicle delay particularly at intersection. One of the most successful tactics for traffic, essential shipping, and pedestrian management is the use of signals at intersections to regulate the flow of traffic from numerous directions. When it comes to smart city transportation systems, the traffic signal processor is the most important and fundamental part. Traffic lights play a significant role in the management and organization of vehicle mobility in urban areas. The directions of traffic flow at a standard four-way isolated intersection are shown in Figure 1 [3]. Let's pretend everyone is driving in a straight line and doing a right turn. There are eight possible directions of traffic flow, numbered from one to eight. Pre-timed signals, where the phases of the signal stay constant throughout phases, are still widely used in metropolitan areas today.

While pre-timed signaling control's architecture is straightforward, it has become more unable to clear traffic, especially during peak hours, as the number of cars on the road has increased. Because of this, waiting times increase, traffic backs up, and gridlock occurs at junctions. Responding to the requirements of intelligent cities to decrease traffic jams during high-traffic minutes or redundant waiting periods during off-peak hours is facilitated by an automated traffic signal control system that adapts to the varying 24 hour conditions of traffic or adjusts the timing of traffic lights relative to its importance. The following are definitions of some relevant terminology used in road signal architecture & regulation:
That's one cycle of the traffic light, there. The duration of a cycle is measured in years. Time is counted from the moment a lane or group of lanes receives a green light till the moment it receives another green light. The yellow gap between a phase's red and green signals represents the transition period. The duration during which a traffic light displays a green light is called a "green interval." This time period represents the red-light status for a certain strategy or combination of strategies. To calculate a phase, add the duration of the preceding green interval to the duration of the subsequent change interval. Non-conflicting activities (movements at an intersection that may continue securely at the same period) are permitted during the green period of every stage. The shape of the intersections plays a crucial role in the stage of layout. According to the volume of traffic, the junction shown in Figure 1 may function in multiple phases. Duration in the green, or the interval between the two stages in a single cycle.
II. RELATED WORK
Ma et. al. (2014) presented use of a model-based methodology to evaluate the impact of vehicular traffic on the natural world and fuel economy. The effectiveness of optimal signaling layouts was assessed in terms of traffic movement along with other critical metrics for long-term viability. Signal design improvement using an evolutionary algorithm was used to minimize things like travel time, traffic congestion, and fuel consumption. Different signal management tactics in a Chinese metropolis were evaluated using the approach via a case study. The computing foundation was enhanced by the addition of two widely used traffic modeling programs, VISSIM & SUMO. Vehicle operated control exceeded fixed time management when evaluating effectiveness under varying plan objectives.
Cheng et al. (2017) proposed a method of controlling a junction based on groups of vehicles traveling in the same direction. To train the neural network, a neuro-fuzzy oriented grouping method was devised. The system's design goals included both vehicle clustering & group management.
Vogel et. al. (2018) developed new solution for traffic control in the field of Intelligent Transportation System (ITS). Optimal traffic control in urban environment was achieved by the applying the principle of real time response to dynamic flow and changes in traffic condition. Three different scenarios were considered to represent traffic demand in order to realistically simulate congested and free flow traffic situations. Results were compared with fixed controller on the basis of queue length, average maximum queue length and average number of vehicles stop. Their results showed that adaptation of cycle length displayed improvement in all the parameters for all simulated scenarios.
Zhu (2019) proposed easy-to-implement, inexpensive reactive signal-control strategy for third-world nations. The suggested technique relied heavily on data gathered during periods of low traffic demand to determine the relative lengths of every phase's green and red redundant periods. Time spent in duplication was cut down by adjusting the timing of the signals. Two case studies were conducted at junctions with varying volume to capability ratios to evaluate the efficacy of the proposed reactive signal management technology. After analyzing scenarios with various sensor placements, we discovered that our suggested strategy resulted in the least amount of traffic congestion.
Li et. al. (2020) addressed the problem of controlling the traffic signals by building a model in traffic simulator SUMO. Using a deep Q-network technique, the suggested model was developed. In case of multiple intersection, the proposed model was found to be efficient than Webster method but, Q-learning model failed to show improved performance due to complex state space. Under complex environments the proposed model worked well.
In order to maximize the security of crossings, Essa et al. (2020) created a self-learning system based on reinforced learning. At every point of decision at a junction, the agent acted by calculating how long until the next green period. The phase order affected how much room there was for action. The suggested technique was validated by comparing it to actuating signal management using real-world traffic data from two signaled junctions. The suggested method was shown to decrease the occurrence of conflicts and increase the influence on safety. Safety was maximized without sacrificing efficiency thanks to the suggested method, as measured by average delay time, queue length, and number of pauses.
To regulate signal timing according to the length of the line and the volume of traffic entering and leaving the junction, Jafari et al. (2021) focused on a particular Tehran intersection. The framework of the prediction regulator was used to create a junction traffic system framework and map out the intersection's state space parameters. A process model, cost function, and control rule make up the model-based controller known as predictive control. The simulation results were used to conclude that the suggested model adaptive controller is stable and that the waiting time for vehicles in all lanes of the junction is reduced when compared to the fixed-time version. The suggested controller's efficacy was validated by these results.
III. DEEP LEARNING ALGORITHM FOR MOVING VECHICLE DETECTING MODULE
Helping drivers and self-guided cars, vehicle recognition in traffic is crucial. A two-stage approach for vehicle detection has been created to address this problem. The proposed auto-identification system's primary goal is to reduce crash rates by improved visibility of close cars in road images captured by cameras mounted on running vehicles; Fig. 2 provides a comprehensive illustration of the suggested approach.
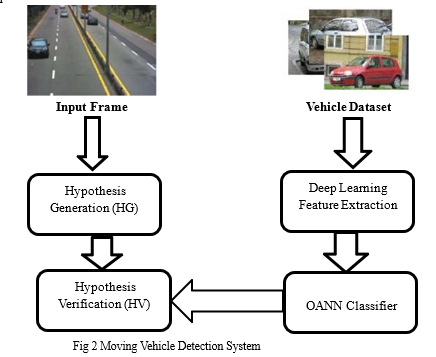
A. Deep Learning Feature Extraction
Prior to the success of implementing deep learning techniques for computer vision applications, traditional methods were used which extracted vehicles features from the images which were the feature representations of the images. Some of the popular techniques used for feature representations in computer vision field were SIFT, SURF, HOG and Bag of Words. It was only after ILSVRC 2012 contest, convolutional neural networks have become a better option in computer vision field by almost reducing the error rate to half. This has made all the state of art computer vision methods to adopt convolutional neural networks.
B. Hypothesis-Generation
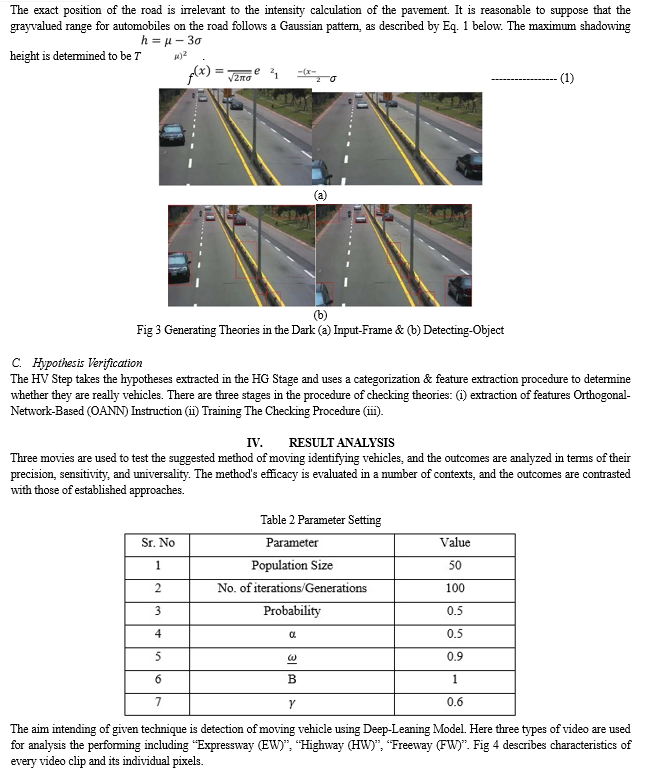
An important part of any vehicle detection system is the process of Idea Generating (HG). The primary goal of the HG phase is to identify vehicles in highway photos. Hypothesized potential cars are removed from the road picture in the HG Stage by analyzing the shadow area underneath them.
An upper limitation might be calculated based on the brightness dispersal of the pavement, even though it is not a constant value, and while there is no minimum threshold set for the brightness of a shadow under a car. This criterion's severity is affected by the road's hue and lighting conditions.

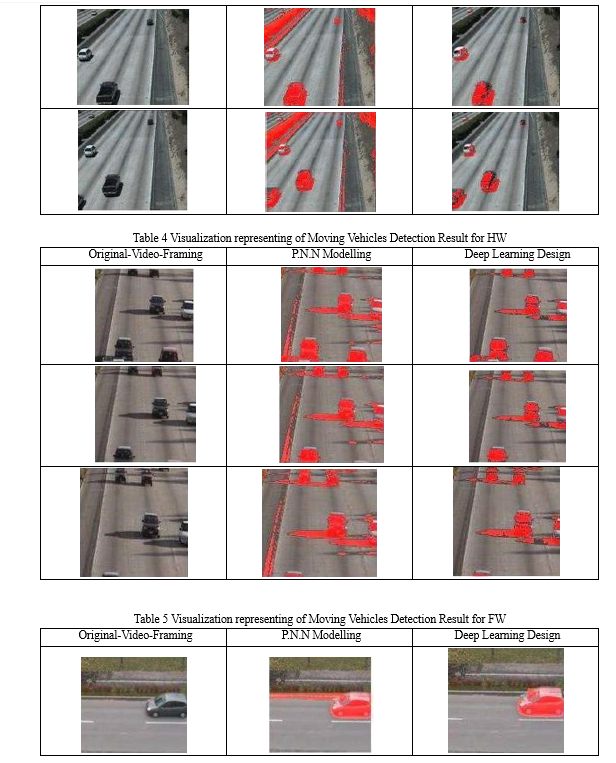

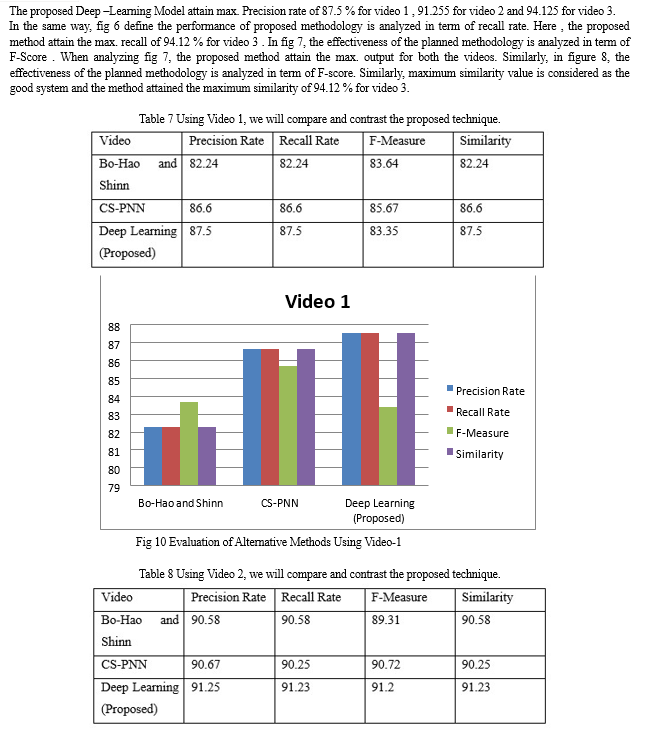

Several approaches, including PNN+CS and Bo-Hoo and Shin (Chen & Huang 2015) on detection of vehicles, are compared to the suggested OCS-PNN modeling based mobile automobile identification in this part. The suggested study successfully implemented a hybrid PNN–OCS algorithm for detecting motion. The suggested method is quite similar to PNN+CS based moving object detection systems, with the key distinction being the optimization technique Algorithm. The technique of Moving Object Retrieval has been described by Bo-Hoo and Shin (Chen & Huang, 2015).
This technique relied only on the PNN concept and did not include any kind of optimisation technique. Precision, Recall, the the F measurement, and Similarities are used to compare the quality of the work that has been suggested. Figure 10-12 compares the results of the new work to those of the old.
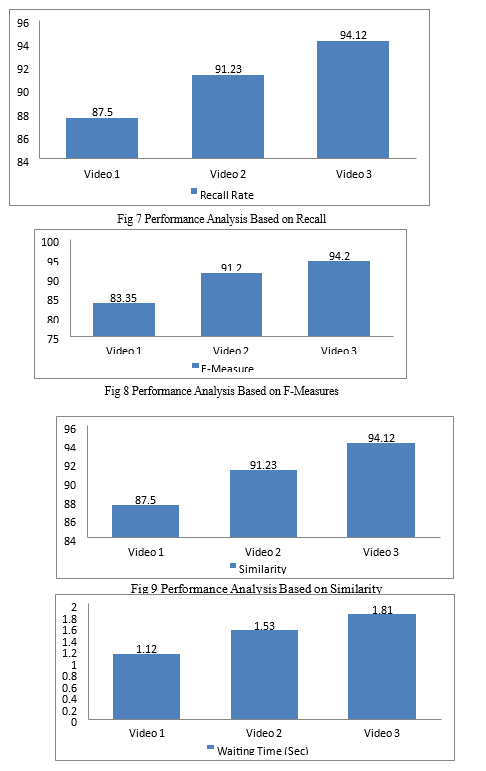
Figure 10-12 displays the results of a comparison between the suggested method and the standard method in terms of precision, recall, similarities, and F-measure. The results of the suggested method for detecting moving vehicles, as measured by precision, are shown in Figure 10. With PNN+CS based mobile detection, Chen & Huang (2015) reach an ultimate precision of 93%, which is 90%. Better results were obtained when the suggested method was applied to Moving Automobile Identification utilizing the Recall measure, as shown in Figure 11.
Our method performs best when both its Precision and Recall scores are high. This means that the suggested method works better and can identify the vehicle that is moving. Both the similarity and F1 values found are high, indicating good precision. Figures 12 show the accuracy rate achieved by the CS-PNNMD technique in comparison to other approaches for each test video sequence of varying data rate. According to the results of the simulated trials, the suggested method not only successfully identifies moving vehicles, but also achieves a much greater degree of detection accuracy via qualitative assessment compared to the state-of-the-art methods. In addition, the suggested technique is compared to video 1 in table 8. Table 5.1 yields the highest possible values for Expertise (87.5%), Recall (87.5%), F-measure (83.35%), and Similarity (87.5%). Table 9 displays a similar comparison of the offered methods with respect to video 2. Here, we get an optimal accuracy of 91.25%, compared to 90.58% when we use (Chen & Huang, 2015), and 90.67% overall.
Conclusion
In this paper, the proposed research has two approaches to detect moving vehicles. First stage is the investigation of the high-velocity OCS-PNN identification of vehicles issue. By combining cuckoo searching with antagonistic studying, we may strike a better balance between the two processes, leading to a near-optimal weight for the PNN that improves detection accuracy & allows for quick convergence when problem-solving. The experimental analysis of overall efficacy was conducted using three different kinds of standard video datasets. The suggested method not only achieves a very high level of accuracy in detecting in contrast to previous methods, as shown by the outcomes of the simulations. Identifying the passing vehicles is also added by acquitting moving information can also be focused as a future work. Furthermore, identification of vehicles at night period could also be included. In order to actualize regardless of the time of day, the method starts with establishing the state of the lighting of the area above the picture. For both daytime and nighttime vehicle detection, a specific algorithm has been developed. Finally, the need of expanding the suggested system to include pedestrian, motorbike, and traffic sign recognition is emphasized. It is planned to improve real-time video\'s capacity for detecting and following moving vehicles, as well as providing an estimate of their velocity.
References
[1] Appathurai, Ahilan, Revathi Sundarasekar, C. Raja, E. John Alex, C. Anna Palagan & Nithya, A 2019, ‘An Efficient Optimal Neural Network-Based Moving Vehicle Detection in Traffic Video Surveillance System’, Circuits, Systems, and Signal Processing : vol.1-23. pp. 1-32. [2] Bastian Leibe, Konrad Schindler, Nico Cornelis & Luc Van Gool 2008, ‘Coupled Object Detection and Tracking from Static Cameras and Moving Vehicles’, IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 30, no. 10, pp. 2-2. [3] Bin Tian, Ye Li, Bo Li & Ding Wen 2014, ‘Rear-View Vehicle Detection and Tracking by Combining Multiple Parts for Complex Urban Surveillance’, IEEE Transactions on Intelligent Transportation Systems, vol. 15, no. 2. [4] Bing-Fei Wu and Jhy-Hong Juang 2012, ‘Adaptive Vehicle Detector Approach for Complex Environments’, IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 2, p. 49. [5] Bo-Hao Chen & Shih-Chia Huang 2014, ‘An Advanced Moving Object Detection Algorithm for Automatic Traffic Monitoring in Real-World Limited Bandwidth Networks’, IEEE Transactions on Multimedia, vol. 16, no. 3, pp. 2-17. [6] Bo-Hao Chen & Shih-Chia Huang 2015, ‘Probabilistic neural networks based moving vehicles extraction algorithm for intelligent traffic surveillance systems’, Information Science, Elsevier pp. 218. [7] Chen, BH & Huang, SC 2015, ‘Probabilistic neural networks based moving vehicles extraction algorithm for intelligent traffic surveillance systems’, Information Sciences, vol. 299, pp. 283-295. [8] Chen, C & Zhang, X 2012, ‘Moving vehicle detection based on union of three-frame difference’, In Advances in Electronic Engineering, Communication and Management vol. 2, pp.459-464. Springer, Berlin, Heidelberg. pp. 1-22. [9] Chen, X, Wang, X & Xuan, J 2018, ‘Tracking multiple moving objects using unscented Kalman filtering techniques’, arXiv preprint arXiv:1802.01235. [10] Chup-Chung Wong, Wan-Chi Siu, Paul Jennings, Stuart Barnes & Bernard Fong 2015, ‘A Smart Moving Vehicle Detection System Using Motion Vectors and Generic Line Features’, IEEE Transactions on Consumer Electronics, vol. 61, no. 3, pp. 2-3. [11] Chup-Chung Wong, WC, Siu, S, Barnes, P, Jennings & Fong, B 2016, ‘Shared-Use Motion Vector Algorithm for Moving Objects Detection for Automobiles’, IEEE International conference on consumer electronics (ICCE). pp. 2-4. [12] Dellaert, F & Thorpe, C 1997, ‘Robust car tracking using Kalman filtering and Bayesian templates’, In Conference on intelligent transportation systems, vol. 1. [13] Dewan, MAA, Hossain, MJ & Chae, O 2008, ‘Moving object detection and classification using neural network’, In KES International Symposium on Agent and Multi-Agent Systems: Technologies and Applications, Springer, Berlin, Heidelberg, pp. 152-161. [14] Dipti Srinivasan, Xin Jin & Ruey Long Cheu 2004, ‘Evaluation of Adaptive Neural Network Models for Freeway Incident Detection’, IEEE Transactions on Intelligent Transportation Systems, vol. 5, no. 1. pp. 2-19. [15] Dong, Z, Wu, Y, Pei, M & Jia, Y 2015, ‘Vehicle type classification using a semisupervised convolutional neural network’, IEEE Trans Intell Transport Syst vol. 16, no. 4, pp. 2247-2256. [16] Dou, Jianfang & Jianxun Li 2013, ‘Moving object detection based on improved VIBE and graph cut optimization’, Optik vol.124, no. 23 pp. 6081-6088. [17] Gang, L, Zhang, M, Zhao, X & Wang, S 2015, ‘Improved genetic algorithm optimization for forward vehicle detection problems’, Information, vol. 6, no. 3, pp.339-360. [18] Gao, ML, He, XH, Luo, DS, Jiang, J & Teng, QZ 2013, ‘Object tracking using firefly algorithm’, IET Computer Vision, vol. 7, no. 4, pp. 227-237. [19] Guruprasad Somasundaram, Ravishankar Sivalingam, Vassilios Morellas & Nikolaos Papanikolopoulos 2012, ‘Classification and Counting of Composite Objects in Traffic Scenes Using Global and Local Image Analysis’, IEEE Transactions on Intelligent Transportation Systems. pp. 2-20. [20] Habtie, AB, Abraham, A & Midekso, D 2017, ‘Artificial neural network based real-time urban road traffic state estimation framework’, In Computational Intelligence in Wireless Sensor Networks, Springer, Cham, pp. 73-97. [21] Hadi, RA, Sulong, G & George, LE 2014, Vehicle detection and tracking techniques: a concise review. arXiv preprint arXiv:1410.5894. pp. 1-23. [22] Hengliang Luo, Yi Yang, Bei Tong, Fuchao Wu & Bin Fan 2017, “Traffic Sign Recognition Using a Multi-Task Convolutional Neural Network’, IEEE Transactions on Intelligent Transportation Systems. pp. 2-21. [23] Meher, SK & Murty, MN 2013, ‘Efficient method of moving shadow detection and vehicle classification’, AEU-International Journal of electronics and Communications, vol. 67, no. 8, pp. 665670. [24] Mimbela, Luz Elena Y & Lawrence A Klein 2000, ‘Summary of vehicle detection and surveillance technologies used in intelligent transportation systems’, vol. 3. [25] Minkyu Cheon, Wonju Lee, Changyong Yoon & Mignon Park 2012, ‘Vision-Based Vehicle Detection System with Consideration of the Detecting Location’, IEEE Transactions on Intelligent Transportation Systems, vol. 13, no. 3, p. 52. [26] Misra, R & Ray, KS 2017, ‘Object Tracking based on Quantum Particle Swarm Optimization’, Ninth International Conference on Advances in Pattern Recognition (ICAPR), pp. 1-6. IEEE. [27] Muchtar, Kahlil & Indra Nugraha 2019, ‘Attention-based approach for efficient moving vehicle classification’, Procedia Computer Science vol. 157, pp. 683-690. [28] Mufioz-Rodriguez, JA, Asundi, A & Rodriguez-Vera, R 2003, ‘Shape detection of moving objects based on a neural network of a light line’, Optics communications, vol. 221, no. 1-3, pp. 73-86. [29] Oz, C & Ercal, F 2003, ‘Automatic vehicle license plate recognition using artificial neural networks’, In Intelligent Systems Design and Applications, Springer, Berlin, Heidelberg, pp. 23-31. [30] Papageorgiou, CP & Poggio, T 1998, ‘A Trainable System for Object Detection in Images and Video Sequences’, WACV\'98. Proceedings., Fourth TEEE Workshop on, IEEE, Massachusetts Institute of Technology Center for Biological and Computational Learning, vol. 1673, pp. 8-14. [31] Patel, HA & Thakore, DG 2013, ‘Moving object tracking using kalman filter’, International Journal of Computer Science and Mobile Computing, vol. 2, no. 4, pp. 326-332. [32] Qingzheng Xu, Lei Wang, Na Wang, Xinhong Hei & Li Zhao 2014, ‘A review of opposition-based learning from 2005 to 2012’, Engineering Appliance of Artificial Intelligence, Elsevier. vol. 43.
Copyright
Copyright © 2024 Sahil Sura, Himmi Gupta. This is an open access article distributed under the Creative Commons Attribution License, which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.

Download Paper
Paper Id : IJRASET57950
Publish Date : 2024-01-09
ISSN : 2321-9653
Publisher Name : IJRASET
DOI Link : Click Here
 Submit Paper Online
Submit Paper Online